Linux�̳̣������˲���ϵͳROSѧϰ�̳�
��������ƪ������Ҫ����ROS�������˲���ϵͳ��Robot Operating System������;����װ��ʽ��
1.1 ROS����Ҫ��;
ROS�������˲���ϵͳ��Robot Operating System������רΪ������������������Ƴ�����һ���Բ���ϵͳ�ܹ�������һ����Դ��Ԫ������ϵͳ�������ϵͳ�����ṩ�����ڲ���ϵͳ�ķ�����Ӳ�������������ײ�����������������ù��ܵ�ִ�С��������Ϣ���ݡ������а���������Ҳ�ṩһЩ���ߺͿ����ڻ�ȡ����������д��ִ�ж���ںϵij���
ROS�����мܹ���һ��ʹ��ROSͨ��ģ��ʵ��ģ���P2P������ϵ��������ӵĴ����ܹ�����ִ�����������͵�ͨѶ���������ڷ����ͬ��RPC��Զ�̹��̵��ã�ͨѶ������Topic���첽������ͨѶ�����в����������ϵ����ݴ洢��
1.2 ROS��װ��ʽ
ROS����װ������ƽ̨�ϣ�Ŀǰ֧����ȫ����Ubuntu����ϵͳƽ̨���Ƽ���Windowsƽ̨�²���������ķ�ʽ���а�װ��������һ����ѧϰʵ�飻
�ٷ��ṩ�����°棨ROS Groovy Galapagos����װ�����ַ���£�http://nootrix.com/downloads/#RosVM
�����������վΪ��https://www.virtualbox.org/
��װ��Oracle VM VirtualBox����˵���������->������������ԡ�->����������ԡ�
ѡ�����صġ�rosGroovyGalapagos.ova���ļ���
��������Ե�������ѡ���У��������һ������Ӳ�̵�λ�õ��ռ�Ƚϴ��Ӳ��������ʱ�ɰ�װ��λ��Ϊ��D:\VirtualOS\VirtualBox��������ͼ��ʾ��

��װ��Ϻ������������Ĭ���û��������붼�ǡ�viki�������к�������ʾ��

���������������նˡ�Terminal��������ROSָ�roscore���������������Ϣ��
���ڣ��������װ����ˣ��Ժ����ǿ�����������������һ��ѧϰ�й�ROS����������ˡ�
1.1 ROS�ļ�ϵͳ�е���ظ���
���ܰ�(Packages)�����ܰ���ROS�бȽϻ�����������֯��ʽ��ÿ�����ܰ��ɰ��������⣬��ִ���ļ����ű��ļ�������������ļ���
Manifest��package.xml��:Manifest�ǹ��ܰ��������ļ�������Ҫ���幦�ܰ����������ܰ�֮���������ϵ�����ṩ���ڹ��ܰ��İ汾��Ϣ��ά������Ϣ��������Ϣ�ȡ�
1.2 �ļ�ϵͳ����
����ROS����ֲ�������ܰ��У��������ls��cd�������dz����������ROS�ṩһЩ�Զ���Ĺ�������������
1.2.1 rospackʹ�ý���
rospack���ڻ�ȡ���ܰ��������Ϣ������ƪ�����У�����ֻ�漰���е�find�����������ع��ܰ���·����Ϣ��
�÷���
# rospack find [package_name]
ʾ��:
$ rospack find roscpp
ִ�н�����£�
YOUR_INSTALL_PATH/share/roscpp
������ROS�Ǵ�apt��װ��Ubuntuϵͳ�еģ�������ʾ���½����
/opt/ros/groovy/share/roscpp
1.2.2 roscdʹ�ý���
roscd ��rosbash���е�һ���֣����������Ըı�·����ָ���Ĺ��ܰ����ܰ����У�
�÷���
# roscd [locationname[/subdir]]
ʾ����
$ roscd roscpp
Ϊ����֤�Ƿ�ı䵽roscpp���ܰ���·���£��ɲ���Uinx������pwd��ӡ����ǰ��·����Ϣ��
$ pwd
�õ�����ִ�н����
YOUR_INSTALL_PATH/share/roscpp
���·������һ��ʾ����rospack find roscpp���ҳ���·����һ�µģ�
ע�⣬roscd������ROS�����һ����ֻ�����ROS_PACKAGE_PATH�����а�����packages��ͨ�������������Բ鿴ROS_PACKAGE_PATH��������Ϣ��
$ echo $ROS_PACKAGE_PATH
ROS_PACKAGE_PATH��������һϵ�б�ð�š�:��������·����ͨ������£�ROS_PACKAGE_PATH����ֵ������ʾ��
/opt/ros/groovy/base/install/share:/opt/ros/groovy/base/install/stacks
�����������������÷�һ�£���������·����ROS_PACKAGE_PATH�У�·���������ð�Ÿ�����
��Ŀ¼
roscdҲ���Ըı䵽һ�����ܰ����߹��ܰ�������Ŀ¼�У�
�����������
$ roscd roscpp/cmake
$ pwd
ִ�н��������ʾ:
YOUR_INSTALL_PATH/share/roscpp/cmake
1.2.3 roscd log
roscd log �������������ROS��־���ڵ�Ŀ¼�£���Ҫע����ǣ������û�������κ�ROS����������ʾ��־Ŀ¼�����ڵĴ�����Ϣ��
������Ѿ����й�ROS�����Գ����������
$ roscd log
1.2.4 roslsʹ�ý���
rosls��rosbash����һ���֣�������ͨ�����ܰ��������г�������������ļ���������ʹ�þ���·����
�÷���
# rosls [locationname[/subdir]]
ʾ����
$ rosls roscpp_tutorials
ִ�н�����£�
cmake package.xml srv
1.2.5 ʹ��Tab��
��ʱƴд���������ܰ������ƻ�ȽϷ���������һ��ʾ���У� roscpp_tutorials��һ���൱�������ƣ����˵��Ǵ�ROS�������֧��TAB��������
����������ʾ������
# roscd roscpp_tut<<< �˴�����TAB�� >>>
����TAB���������л��Զ���������µ��ַ���������ʾ��
$ roscd roscpp_tutorials/
1.2.6 ROS����ߵķ��
���������һЩʾ�������ܽ������ROS������������
rospack = ros + pack(age)
roscd = ros + cd
rosls = ros + ls
��ROSϵͳ�У��ֵ�����߾�����������������ʽ��
��������ƪ���½��������roscreate-pkg��catkin����һ���µĹ��ܰ�������rospack�г����ܰ���������ϵ��
1��catkin���ܰ������
Ҫ���һ��catkin���ܰ������������������������
• ���ܰ��������һ��catkin���ݵ�ע���ļ�package.xml��
o package.xml�ļ��ṩ�йع��ܰ���Ԫ��Ϣ��
• ���ܰ������������catkin��CmakeLists.txt�ļ�
o ���������metapackages���ذ���CmakeLists.txt
• ��һ���ļ����в��������ֶ�����ܰ�
o ����ζ�Ŷ�����ܰ����ܹ���һ��·����Ҳ���������ܰ�֮���Ƕ�װ���
��Ĺ��ܰ����������ʾ��
• my_package/
• CMakeLists.txt
• package.xml
2��catkin Workspace��Ĺ��ܰ�
�Ƽ���catkin workspace�����ɲ�����catkin ���ܰ�����Ȼ��catkin���ܰ�Ҳ�ɵ������롣catkin workspace���ļ���֯��ʽ������ʾ��
• workspace_folder/ -- WORKSPACE
• src/ -- SOURCE SPACE
• CMakeLists.txt -- 'Toplevel' CMake file, provided by catkin
• package_1/
• CMakeLists.txt -- CMakeLists.txt file for package_1
• package.xml -- Package manifest for package_1
• ...
• package_n/
• CMakeLists.txt -- CMakeLists.txt file for package_n
• package.xml -- Package manifest for package_n
�ڴ���catkin���ܰ�֮ǰ�������ȴ���һ���յ�catkin workspace������Ϊcatkin_ws������������ϰ�������catkin_ws�½��У�
3������catkin���ܰ�
��������������������catkin_create_pkg���������һ���µ�catkin���ܰ���������catkin���ܰ�����;��
���ȣ��ı�·����catkin workspace��srcĿ¼�ڣ�
# You should have created this in the Creating a Workspace Tutorial
$cd~/catkin_ws/src
����ʹ��catkin_create_pkg���������Ϊbeginner_tutorials�Ĺ��ܰ�������������¹��ܰ�������std_msg��roscpp��rospy��
?1 $ catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
�⽫�ᴴ��һ��beginner_tutorials���ļ��У�����ļ����ڻ��Զ�����package.xml�ļ���CmakeLists.txt�ļ�����������ļ����������catin_create_pkg��������ò�����дһЩ��Ϣ��
Catkin_create_pkg����IJ�����������ܰ������ּ����������ܰ���һЩ����ѡ�
# This is an example, do not try to run this
# catkin_create_pkg
4�����ܰ�������ϵ
4.1 ֱ�ӣ�һ����������ϵ
��ʹ��catkin_create_pkgʱ��һЩ�����Ĺ��ܰ���Ҫ�ṩ��������Щֱ�ӣ�һ����������ϵ����ͨ�������rospack�鿴��
?1 $ rospack depends1 beginner_tutorials
• std_msgs
• rospy
• roscpp
������һ����rospack�г�����catkin_create_pkg����ʱ���õ��������ܰ�����Щ�������ܰ���Ϣ��������package.xml�ļ��ڣ�
$ roscd beginner_tutorials
$catpackage.xml
•
• ...
•
•
•
•
• ...
•
4.2 ���������ϵ
�ںܶ�����£��������ܰ�����Ҳ��Ҫ�Լ����������ܰ������磬rospy�ͻ���ҪһЩ�������ܰ���
$ rospack depends1 rospy
• genpy
• rosgraph
• rosgraph_msgs
• roslib
• std_msgs
һ�����ܰ�����Ҫ�ܶ��ӵ��������ܰ������˵��ǣ�rospack���Դ��������Ƕ���������ܰ���
$ rospack depends beginner_tutorials
cpp_common
rostime
roscpp_traits
roscpp_serialization
genmsg
genpy
message_runtime
rosconsole
std_msgs
rosgraph_msgs
xmlrpcpp
roscpp
rosgraph
catkin
rospack
roslib
rospy
5�� �������ɵĹ��ܰ�
��һ���ֽ������в鿴catkin_create_pkg�Զ����ɵĸ����ļ�����������Ҫ�������ǣ�
5.1 �����ļ�package.xml
�����´����Ĺ��ܰ��ڻ����һ��package.xml�ļ����������Dz鿴һ���ļ�package.xml������ЩԪ������������Ҫ��ע�ģ�
5.1.1 ������ǩ
������Ҫ���µ���������ǩ��
���������Ҫ���ı���Щ������Ϣ��˳����ʾһ�£���ò���һ�仰����������ܰ�����;��Ϣ��
5.1.2 ά���߱�ǩ
���������ǿ��Կ���ά���߱�ǩ��
����package.xml�ļ�����һ���dz���Ҫ�ı�ǩ����������������֪��ά��������ܰ�����ϵ����Ϣ�������ṩһ��ά������Ϣ����Ȼ�������Ҫ������������κ�һ��ά���ߵ���Ϣ��ά���ߵı�ǩ����body��λ�ã����������email��ϢҲ��Ҫ��д������
5.1.3 ���ɱ�ǩ
�����������ɱ�ǩ�������ǩҲ�DZ�Ҫ�ģ�
����ѡ��һ��license��д�����档���õ�license��ϢΪBSD��MIT��Boost Software License��GPLv2��GPLv3��LGPLv2.1��LGPLv3�ȣ������ƪ���£�����ʹ��BSD���ɡ�
5.1.4 �������ܰ���ǩ
����һ���ǩ������������ܰ���������ϵ�ġ���Щ������ϵ�� build_depend��buildtool_depend��run_depend��test_depend�ȷָ������й���Щ��ǩ�ĸ���ϸ���������Բ鿴catkin dependencies����Ϊ����������catkin_create_pkg�����std_msg��roscpp��rospy��������˿��Կ�������������
��catkin���ܰ������Ĭ�ϵ�buildtool_dependon�������г�������������Ϊbuild_depend���ӽ���������ϣ���ڱ��������ʱ��ָ����ص����������������Ϊÿһ������������һ��run_depend��ǩ��
5.1.5 ���յ�package.xml
ȥ��ע�⼰û���õ��ı�ǩ�����յ�package.xml�ļ�������ʾ������������࣬
6���������ɵ�CMakeLists.txt�ļ�
��Ȼ����Ԫ��Ϣ��package.xml�Ѿ�������Ҫ�����ģ����Ѿ���������ϰ�����˰ɡ�Catkin_create_pkg�������ļ�CMakeLists.txt�����Ժ���빦�ܰ�ʱ�����������ƣ�
��������ƪ�̳���Ҫ���ܱ��빦�ܰ��Ĺ�������
1�����빦�ܰ�
ֻҪ���ܰ���������Ѿ���װ��ϣ����ǾͿ��Ա����µĹ��ܰ��ˣ�
�ڿ�ʼ֮ǰ�����ͨ��sourceָ���������еĻ�������Ubuntuϵͳ�п���ִ������ָ�
$source/opt/ros/groovy/setup.bash
1.1 ʹ��catkin_make
catkin_make��һ�������й��ߣ������������һЩ��catkin�Ĺ������̣�������Ϊcatkin_make��Cmakeִ�������ϵ�����cmake��make��
�÷���
# In a catkin workspace
$ catkin_make [make_targets] [-DCMAKE_VARIABLES=...]
���ڲ�����ϤCmake���������̵����ѣ����Բο�������ʾ������Ĵ���ֻ����ʾCMake�ı����̣�����ִ�У�
# In a CMake project
$mkdirbuild
$cdbuild
$ cmake ..
$make
$makeinstall # (optionally)
ÿһ��CMake�����ǵ�������ģ�����һ��workspace���catkin�����ǿ���һ����룬һ�����ʱ���Բο��������̽��У�
# In a catkin workspace
$ catkin_make
$ catkin_make install # (optionally)
���������������src�ļ�������κ�һ��catkin���̣������Ĵ����ڱ��λ�ã�����my_src����Ӧ�����µ���catkin_make�����Ϊʾ����my_src���ܲ����ڣ������ָ�һ���ܱ���ɹ�����
# In a catkin workspace
$ catkin_make --sourcemy_src
$ catkin_make install--sourcemy_src # (optionally)
2�� �������Լ��Ĺ��ܰ�
�����Ѿ�������һ��catkin workspace��һ������Ϊbeginner_tutorials��catkin���ܰ����ı�·����catkin workspace�в鿴һ��src�ļ��У�
$cd~/catkin_ws/
$lssrc
• beginner_tutorials/ CMakeLists.txt@
��Ӧ������һ������Ϊbeginner_tutorials���ļ��У�������������catkin_make����������ܰ���
$ catkin_make
��Ӧ������Դ��cmake��make�������Ϣ������������ʾ��
• Base path: /home/user/catkin_ws
• Source space: /home/user/catkin_ws/src
• Build space: /home/user/catkin_ws/build
• Devel space: /home/user/catkin_ws/devel
• Install space: /home/user/catkin_ws/install
• ####
• #### Running command: "cmake /home/user/catkin_ws/src
• -DCATKIN_DEVEL_PREFIX=/home/user/catkin_ws/devel
• -DCMAKE_INSTALL_PREFIX=/home/user/catkin_ws/install" in "/home/user/catkin_ws/build"
• ####
• -- The C compiler identification is GNU 4.2.1
• -- The CXX compiler identification is Clang 4.0.0
• -- Checking whether C compiler has -isysroot
• -- Checking whether C compiler has -isysroot - yes
• -- Checking whether C compiler supports OSX deployment target flag
• -- Checking whether C compiler supports OSX deployment target flag - yes
• -- Check for working C compiler: /usr/bin/gcc
• -- Check for working C compiler: /usr/bin/gcc -- works
• -- Detecting C compiler ABI info
• -- Detecting C compiler ABI info - done
• -- Check for working CXX compiler: /usr/bin/c++
• -- Check for working CXX compiler: /usr/bin/c++ -- works
• -- Detecting CXX compiler ABI info
• -- Detecting CXX compiler ABI info - done
• -- Using CATKIN_DEVEL_PREFIX: /tmp/catkin_ws/devel
• -- Using CMAKE_PREFIX_PATH: /opt/ros/groovy
• -- This workspace overlays: /opt/ros/groovy
• -- Found PythonInterp: /usr/bin/python (found version "2.7.1")
• -- Found PY_em: /usr/lib/python2.7/dist-packages/em.pyc
• -- Found gtest: gtests will be built
• -- catkin 0.5.51
• -- BUILD_SHARED_LIBS is on
• -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
• -- ~~ traversing packages in topological order:
• -- ~~ - beginner_tutorials
• -- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
• -- +++ add_subdirectory(beginner_tutorials)
• -- Configuring done
• -- Generating done
• -- Build files have been written to: /home/user/catkin_ws/build
• ####
• #### Running command: "make -j4" in "/home/user/catkin_ws/build"
• ####
ע��catkin_make������ʾ��ÿ����space��ʹ�õ�·������Ϊ���õ�Ĭ�ϲ�������������������ļ��У�����ͨ��ls�鿴��
$ls
• build
• devel
• src
build�ļ����DZ���ʱ��Ĭ��λ�ã����ﱣ����cmake��make���ü�������Ϣ������ļ���devel�ļ����DZ����������ģ������Ŀ�ִ���ļ��������Ᵽ�������λ�ã�
��������ƪ�̳���Ҫ����ROSͼ�ĸ�������й���roscore��rosnode��rosrun�ȣ�
1���ر�����
����ƪ�̳�����ǻ�ʹ��һ����������ģ����������ͨ����������װ��
$ sudo apt-get install ros-
�滻������
2�����ͼ�ĸ���
• �ڵ㣺�ڵ���һ����ִ���ļ�������������ROS�ڵ����ͨ�ţ�
• ��Ϣ��ROS�е�һ���������ͣ����ڶ��Ļ��߷���һ�����⣻
• ���⣺�ڵ㷢����һ�����⣬ͬʱҲ���Խ���һ�����⣻
• Master��ROSϵͳ�е����ƹ�����������ڵ�֮��IJ��ң�
• rosout����ROSϵͳ���൱�ڱ���stdout/stderr��
• roscore��Master+rosout+parameter server��parameter server���Ժ���ܣ�
3��Nodes�ڵ�
�ڵ�ֻ������ROS���ܰ��е�һ����ִ���ļ���ROS�ڵ����ROS�ͻ��˿��������ڵ����ͨ�ţ��ڵ���Է�������һ�����⣬Ҳ�����ṩ��ʹ��һ������
4���ͻ��˿�
ROS�ͻ��˿������ڵ��Բ�ͬ�ı������ʵ�֣�ͨ�ŷ�ʽҲ���Բ��ò�ͬ������ʵ�֣�
• rospy Ϊ python ����ʵ�ֵĿͻ��˿�
• roscpp Ϊ c++ ����ʵ�ֵĿͻ��˿�
5��roscore
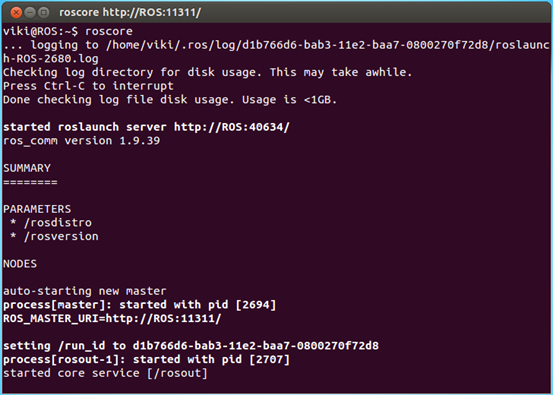
ʹ��ROSʱ��roscore �ǵ�һ����Ҫ���е�ָ�
ָ������:
$ roscore
���к����������µ������Ϣ��
• ... logging to ~/.ros/log/9cf88ce4-b14d-11df-8a75-00251148e8cf/roslaunch-machine_name-13039.log
• Checking log directory for disk usage. This may take awhile.
• Press Ctrl-C to interrupt
• Done checking log file disk usage. Usage is <1GB.
•
• started roslaunch server http://machine_name:33919/
• ros_comm version 1.4.7
•
• SUMMARY
• ========
•
• PARAMETERS
• * /rosversion
• * /rosdistro
•
• NODES
•
• auto-starting new master
• process[master]: started with pid [13054]
• ROS_MASTER_URI=http://machine_name:11311/
•
• setting /run_id to 9cf88ce4-b14d-11df-8a75-00251148e8cf
• process[rosout-1]: started with pid [13067]
• started core service [/rosout]
���roscoreû�гɹ���ʼ�����п������������õ����⣻
6��rosnode��ʹ��
��һ���µ������նˣ�����rosnode�鿴һ���������е�roscore����ʲô
rosnode������ʾ�������е�ROS�ڵ���Ϣ��
rosnode list�г������ڻ�Ľڵ㣺
$ rosnode list
���ῴ������ִ�н��
• /rosout
�����ֻ��һ���ڵ��������У�����rosout������һ��ʼ�ն������еĽڵ㣬�������ռ��ڵ�ĵ��������Ϣ�ȣ�
rosnode info������ʾָ���Ľڵ����Ϣ��
$ rosnode info /rosout
�⽫��ʾ���ڵ�rosout�������Ϣ��������������/rosout_agg�ȣ�
• ------------------------------------------------------------------------
• Node [/rosout]
• Publications:
• * /rosout_agg [rosgraph_msgs/Log]
•
• Subscriptions:
• * /rosout [unknown type]
•
• Services:
• * /rosout/set_logger_level
• * /rosout/get_loggers
•
• contacting node http://machine_name:54614/ ...
• Pid: 5092
���ڣ����Dz鿴�����Ľڵ㣻��β���rosrun�ķ�ʽ����ڵ㣻
7��rosrun��ʹ��
����rosrunָ�����ͨ�����ܰ�������ֱ������һ���ڵ㣬������֪��������ܰ��ľ���·����
�÷���
$ rosrun [package_name] [node_name]
������������һ��turtlesim���ܰ���Ľڵ�turtlesim_node��
��һ���µ������ն���������ָ�
$ rosrun turtlesim turtlesim_node
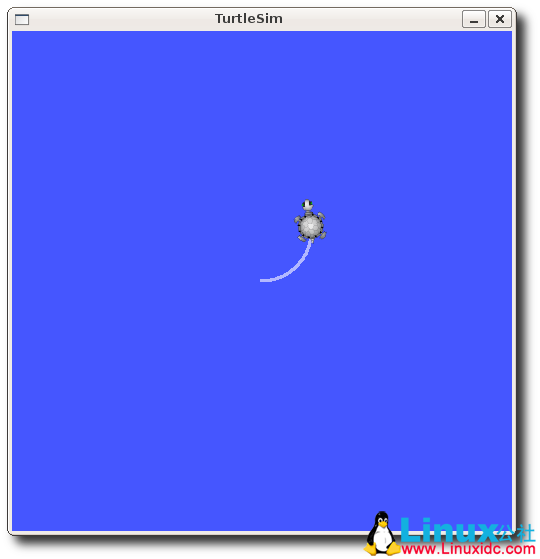
���Կ���һ��turtlesim���ڣ�
ע�⣺turtlesim�����е�С�ڹ���ܲ�һ�������õ��ģ�ROS���ж������͵�С�ڹ꣬�����һ����ϲŶ��
��һ���µ������ն����룺
$ rosnode list
���Կ���������Ϣ��
• /rosout
• /turtlesim
ROS��һ���Ƚ�ǿ��Ĺ����������ͨ������������ָ�����ƣ�
�ر�turtlesim����ֹͣ����ڵ㣬���߷���rosrun turtlesim�����նˣ�����crtl+C���̡����������������������������ͨ��ӳ�������Remapping Argument�����ı�ڵ������:
$ rosrun turtlesim turtlesim_node __name:=my_turtle
����������Ȼ����rosnode list��
$ rosnode list
• ����õ����������Ϣ��
• /rosout
• /my_turtle
���Dz鿴����µ�my_turtle�ڵ㣬��β�������һ��rosnode����ping��������ʾ��
$ rosnode ping my_turtle
• rosnode: node is [/my_turtle]
• pinging /my_turtle with a timeout of 3.0s
• xmlrpc reply from http://aqy:42235/ time=1.152992ms
• xmlrpc reply from http://aqy:42235/ time=1.120090ms
• xmlrpc reply from http://aqy:42235/ time=1.700878ms
• xmlrpc reply from http://aqy:42235/ time=1.127958ms
8��Review�ع�
��һ�����ǽ���������һЩָ�
roscor = ros+core��master����ROS���ṩ���ֵķ���+rosout��stdout/stderr��+parameter server����������
rosnode = ros+node�����ڻ�ȡ�ڵ���Ϣ��ROS ���ߣ�
rosrun = ros+run����ָ���Ĺ��ܰ�������һ���ڵ㣻
��������ƪ�̳���Ҫ����ROSϵͳ�еĻ��⼰rostopic��rqt_plot������ߣ�
1. Setup��װ
1.1 roscore
����ȷ��roscore�Ѿ��������У���һ���µ������նˣ���������ָ�
$ roscore
�����ʱ����Ȼ��������һƪ�̳��е�roscore�����ῴ�����´�����Ϣ��
• roscore cannot run as another roscore/master is already running.
• Please kill other roscore/master processes before relaunching
����û��ʲô����ģ���Ϊֻ����һ��roscore���У�
1.2 turtlesim
����ƪ�̳̣�������Ȼʹ��turtlesim���ܰ�����һ���µ������նˣ���������ָ�
$ rosrun turtlesim turtlesim_node
1.3 ����ң���ڹ�
������Ҫ��ȡһЩ��ʩ�������ڹ꣬�����µ������ն���������ָ�
$ rosrun turtlesim turtle_teleop_key
• [ INFO] 1254264546.878445000: Started node [/teleop_turtle], pid [5528], bound on [aqy], xmlrpc port [43918], tcpros port [55936], logging to [~/ros/ros/log/teleop_turtle_5528.log], using [real] time
• Reading from keyboard
• ---------------------------
• Use arrow keys to move the turtle.
�����Ϳ���ʹ�ü����ϵķ�������ٿ��ڹ��˶��ˣ�����ڹ겻����������Ҫѡ��turtle_teleop_key���ڣ�ȷ�����µļ������ڲɼ�����
•
���ڿ��Բ����ڹ������ˣ����ǿ��������澿��������ʲô�£�
2. ROSϵͳ�еĻ���
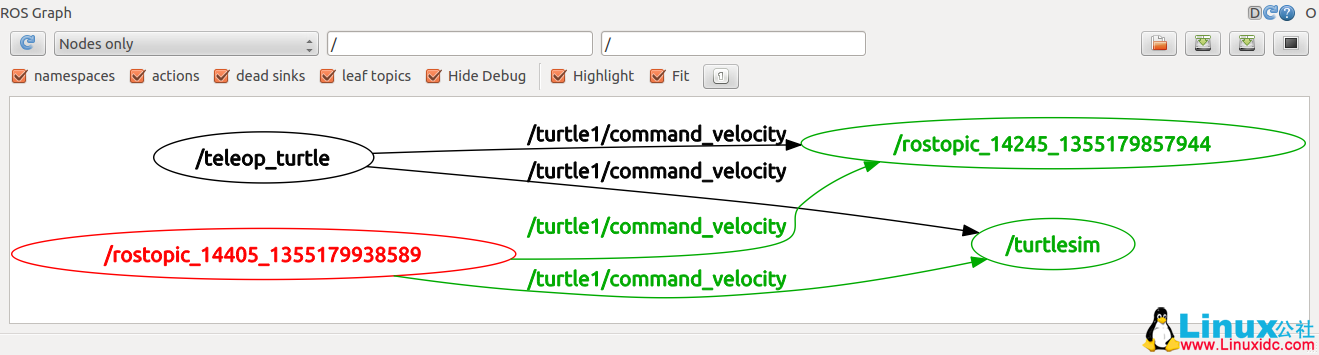
Turtlesim_node�ڵ��turtle_teleop_key�ڵ�֮��ͨ��ROSϵͳ�Ļ������ͨ�ţ�turtle_teleop_key�ڵ㷢�����̵Ķ��������⣬ͬʱturtlesim����ͬ���Ļ��������ռ��̶��������ǿ���ͨ�� rqt_graph�鿴��ǰ���еĽڵ�ͻ��⡣
ע�⣺�������electric������ڵİ汾���Dz�֧��rqt�ģ�����ͨ��rxgraph�������
2.1 rqt_graph���÷�
rqt_graph�����һ������ϵͳ�������е�Ԫ�أ�ע�ڵ㼰����ȣ��Ķ�̬ͼ��������rqt���ܰ���һ���֣�����㻹û�а�װ������ͨ�����·�ʽ��װ��
• $ sudo apt-get install ros-
�滻ָ���е�
�´�һ�������նˣ���������ָ��:
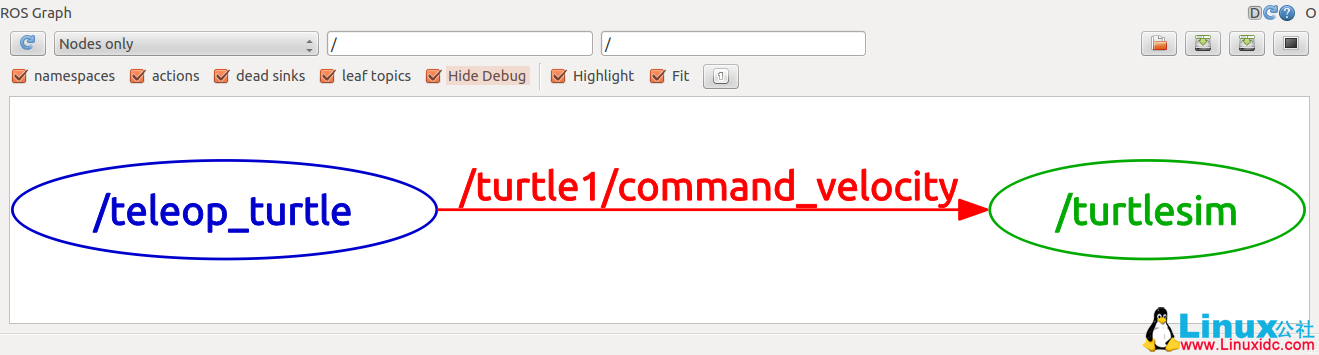
$ rosrun rqt_graph rqt_graph
���Կ����������Ƶ�ͼ��
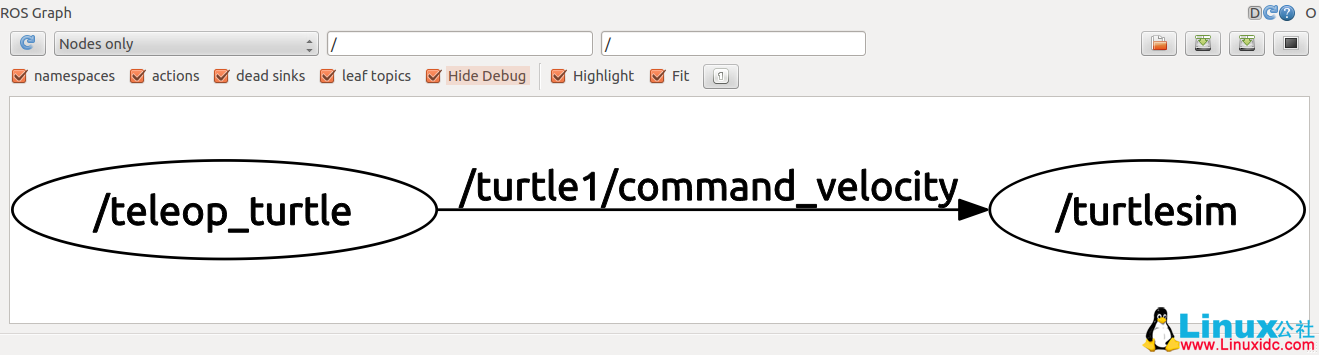
����������õ�/turtle1/command_velocity�ϣ�ROS�ڵ㣨��ɫ����ɫ��ʾ�ģ������⣨��ɫ��ʾ�ģ�����ָ����� ��ͼ��ʾ��turtlesim_node��turtle_teleop_key�ڵ�ͨ������Ϊ/turtle1/command_velocity�Ļ������ͨ�ţ�
2.2 rostopic����
ͨ��rostopic���߿��Ի�ȡ�й�ROS�������Ϣ��
����ͨ��help������ȡ�й�rostopic�Ĵμ�����ѡ���÷���
$ rostopic -h
• rostopic bw display bandwidth used by topic
• rostopic echo print messages to screen
• rostopic hz display publishing rate of topic
• rostopic list print information about active topics
• rostopic pub publish data to topic
• rostopic type print topic type
��������ʹ����Щ�μ����������һ��turtlesim�ڵ㣻
2.3 rostopic echo���÷�
Rostopic echo ��ʾ�������������������Ϣ��
�÷���
rostopic echo [topic]
������һ���µ������ն��²鿴�ڵ�turtle_teleop_key������/turtle1/command_velocity��������ݣ�
$ rostopic echo /turtle1/command_velocity
��Ҳ��ʲô������������Ϊ�ڵ�û�����ڷ������ݸ����⣬����Ҫͨ�����������turtle_teleop_key�������ݣ���Ҫע����ǣ�����ڹ�û�ж�������Ҫ����ѡ��turtle_teleop_key�������նˣ�
����㰴�����ϵķ����������Կ������µ������Ϣ��
• ---
• linear: 2.0
• angular: 0.0
• ---
• linear: 2.0
• angular: 0.0
• ---
• linear: 2.0
• angular: 0.0
• ---
• linear: 2.0
• angular: 0.0
• ---
• linear: 2.0
• angular: 0.0
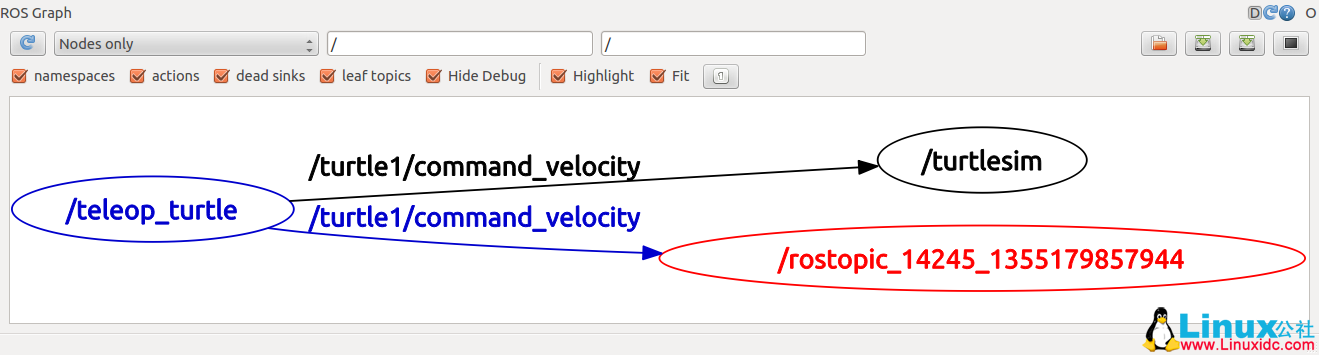
�����ٴβ鿴һ��rqt_graph����Ҫˢ��һ�£������Կ���rostopic echo�ڵ㣨����ɫ��ʾ��Ҳ�ڶ���trutle1/command_velocity�����ˣ�
2.4 rostopic list���÷�
rostopic list ����ʾ����ǰ�ṩ���ĺͷ��������л�����Ϣ��
���Dz���һ��list�Ĵμ�������ʲô����һ���µ������նˣ���������ָ�
$ rostopic list -h
• Usage: rostopic list [/topic]
•
• Options:
• -h, --help show this help message and exit
• -b BAGFILE, --bag=BAGFILE
• list topics in .bag file
• -v, --verbose list full details about each topic
• -p list only publishers
• -s list only subscribers
����ʹ��rostopic list�� verboseѡ�
[plain] view plaincopyprint?$ rostopic list -v
$ rostopic list -v
�⽫��չʾһ���йط����������ߵ���ϸ�б������ǵ����͡�
• Published topics:
• * /turtle1/color_sensor [turtlesim/Color] 1 publisher
• * /turtle1/command_velocity [turtlesim/Velocity] 1 publisher
• * /rosout [roslib/Log] 2 publishers
• * /rosout_agg [roslib/Log] 1 publisher
• * /turtle1/pose [turtlesim/Pose] 1 publisher
•
• Subscribed topics:
• * /turtle1/command_velocity [turtlesim/Velocity] 1 subscriber
• * /rosout [roslib/Log] 1 subscriber
3. ROS��Ϣ
�ڵ�ͨ������ͨ��ʱ�Dz���ROS��Ϣ�ķ�ʽ���еģ����ڷ�����turtle_teleop_key�Ͷ�����turtlesim_node֮���ͨ�ţ������ߺͶ����߱����������һ�µ���Ϣ���༴����ͨ���������ɷ��������͵���Ϣ���;����ġ������������Ϣ���Ϳ���ͨ��rostopic type����
3.1 rostopic type���÷�
rostopic type���ػ��ⷢ�����κ�һ����Ϣ�����͡�
�÷���
rostopic type [topic]
�������룺
$ rostopic type /turtle1/command_velocity
• You should get:
• �õ����½����
turtlesim/Velocity
����ͨ��rosmsg�鿴����ϸ����Ϣ��
$ rosmsg show turtlesim/Velocity
• float32 linear
• float32 angular
��������֪����turtlesim��Ҫʲô���͵������ˣ�������ǿ��Զ�С�ڹ귢�������ˣ�
4. rostopic���佲��
����֪����ROS��Ϣ����������ʹ��rostopic������Ϣ��
4.1 pub rostopic pub���÷�
rostopic pub �������ݸ���ǰ���ڵĻ��⣻
�÷���
rostopic pub [topic] [msg_type] [args]
ʾ����
$ rostopic pub -1 /turtle1/command_velocity turtlesim/Velocity -- 2.0 1.8
��ָ���У�����һ����Ϣ��turtlesim��֪ͨ������2.0�������ٶȼ�1.8�Ľ��ٶ����У�
•
����һ���Ƚϰ¸��ӵ�ָ��������ſ�һ��ÿһ��������
• rostopic pub
��ʾ������Ϣ��ָ���Ļ��⣻
• -1
-1ѡ���ʾֻ����һ����Ϣ��Ȼ���ͣ����
• /turtle1/command_velocity
ָ��Ҫ���͵Ļ��⣻
• turtlesim/Velocity
ָ�������������Ϣ����
• --
��--�����߽���������IJ�������ѡ���ˣ�������Ϣ�ľ�����ֵ��������ֵΪ����ʱ�Ƿdz��б�Ҫ�ģ�
• 2.0 1.8
��ǰ���ᵽ�ģ�turtlesim/Velocity���������������͵����ݣ������ٶȺͽ��ٶȣ�����2.0��ʾ�����ٶȣ�1.8��ʾ���ٶȵ���ֵ����Щ������ʾ��ʽ����YAML���������Բ鿴�й�YAML�Ľ��ܣ�
���ע�С�ڹ��Ѿ�ֹͣ�˶��ˣ���Ϊ����Ҫ��1Hz���������������������ǿ���ʹ��rostopic pub �Crָ��Ϸ�����������
$ rostopic pub /turtle1/command_velocity turtlesim/Velocity -r 1 -- 2.0 -1.8
����ָ����1Hz��Ƶ�ʲ��Ϸ����ٶ����ݵ��ٶȻ��⣻
•
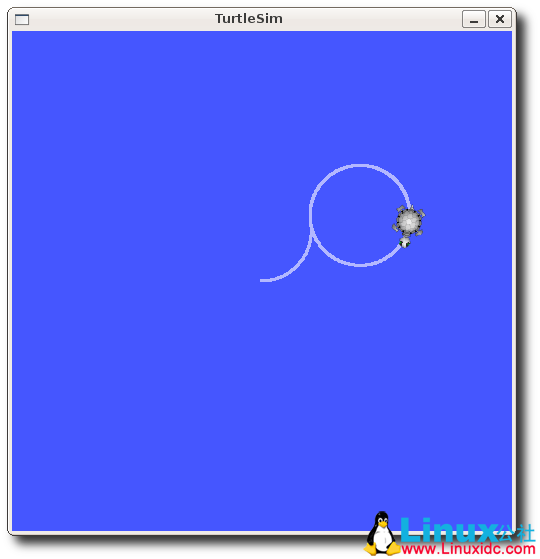
���ǿ���ͨ��rqt_graph�鿴ʲô�������У�rostopic pub�ڵ㣨��ɫ��ʾ������rostopic echo�ڵ㣨��ɫ��ʾ������ͨ�ţ�
������С�ڹ겻�ϵ���Բ�����С���һ���µ������նˣ�����ʹ��rostopic echo���Բ鿴��tertlesim������������Ϣ��
4.1 rostopic hz���÷�
rostopic hz�ᱨ������ݷ�����Ƶ�ʣ�
�÷���
rostopic hz [topic]
���Dz鿴һ��turtlesim_node������/turtle1/pose�ж�죺
$ rostopic hz /turtle1/pose
���Կ�������ִ�н����
• subscribed to [/turtle1/pose]
• average rate: 59.354
• min: 0.005s max: 0.027s std dev: 0.00284s window: 58
• average rate: 59.459
• min: 0.005s max: 0.027s std dev: 0.00271s window: 118
• average rate: 59.539
• min: 0.004s max: 0.030s std dev: 0.00339s window: 177
• average rate: 59.492
• min: 0.004s max: 0.030s std dev: 0.00380s window: 237
• average rate: 59.463
• min: 0.004s max: 0.030s std dev: 0.00380s window: 290
�������ǿ��Կ���turtlesim����60Hz��Ƶ�ʷ������ݸ�С�ڹ꣬����Ҳ����ͨ��rostopic type��rosmsg show ������һ��ķ�ʽ����йػ���ĸ���ϸ��Ϣ��
$ rostopic type /turtle1/command_velocity | rosmsg show
���������Ѿ�����ͨ��rostopit����黰���ˣ����ǻ���Ҫʹ���������߲鿴һ��turtlesim���������ݣ�
5. rqt_plot�÷�
ע�⣺���ʹ��electric���߸����ڵİ汾��rqt�Dz�֧�ֵģ���rxplot�����
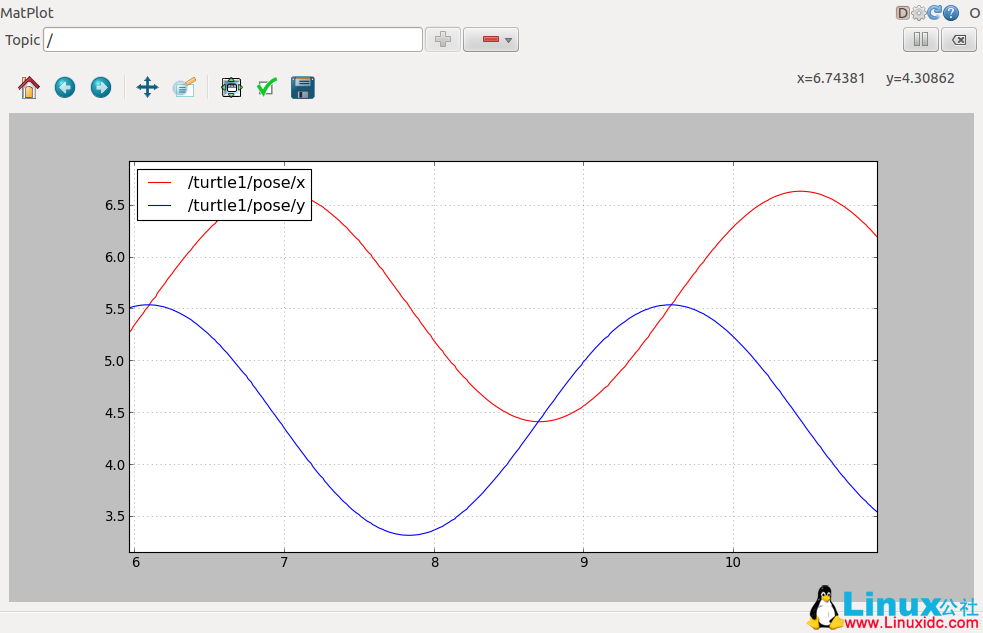
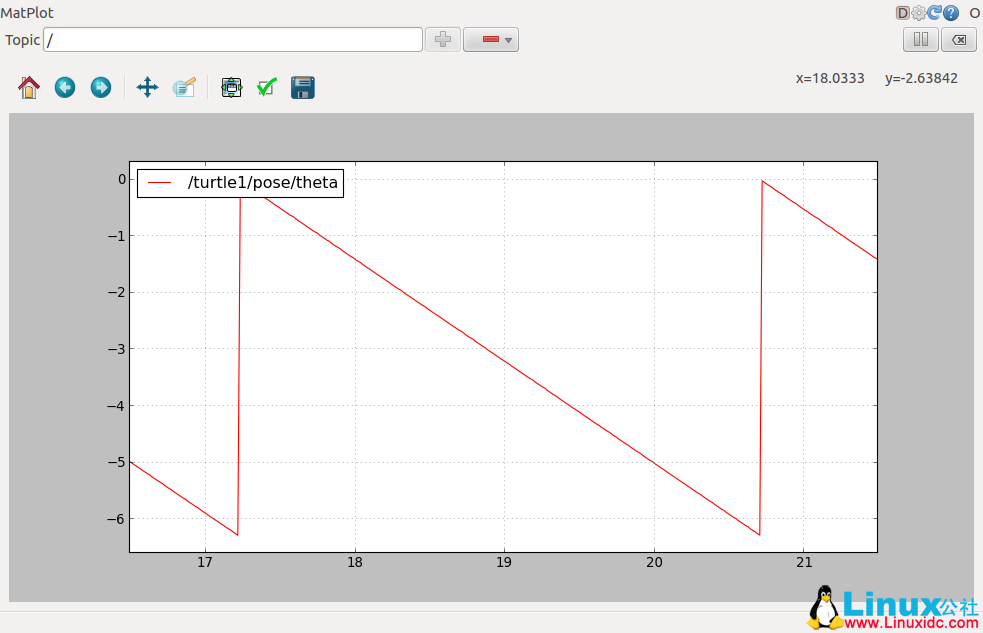
rqt_plotչʾ�����й���������ʱ����������ߡ���������ʹ��rqt_plot����������/turtle1/pose�����ݣ�
$ rosrun rqt_plot rqt_plot /turtle1/pose/x:y
$ rosrun rqt_plot rqt_plot /turtle1/pose/theta
�����һ��ͼչʾ��x-y��λ����ʱ��Ĺ�ϵ���ڶ���ͼչʾ�˺����theta������ǣ�����ֵ��ʱ��Ĺ�ϵ��
��������ƪ�̳̽�����rosservice��rosparam����߽���ROSϵͳ�еķ�������
��������һ���̳�����ϰ��turtlesim_node�������У����ǿ�һ��turtlesim�ڵ㶼�ṩ����Щ����
1. ROS����
�����ǽڵ�֮��ͨ�ŵ���һ�ַ�ʽ��ͨ������ڵ���Է��������շ�����
2. rosservice���÷�
rosservice���Ժ�����������ROS�ͻ���/����˵Ŀ���У�rosservice���кܶ�������ڻ��⣬���£�
�÷���
rosservice list print information about active services
rosservice call call the service with the provided args
rosservice type print service type
rosservice find find services by service type
rosservice uri print service ROSRPC uri
2.1 rosservice list
$ rosservice list
���listָ��չʾ��turtlesim�ڵ��ṩ9������reset, clear, spawn, kill,turtle1/set_pen, /turtle1/teleport_absolute, /turtle1/teleport_relative, turtlesim/get_loggers, ��turtlesim/set_logger_level.����������rosout�ڵ���صķ���/rosout/get_loggers and /rosout/set_logger_level.
• /clear
• /kill
• /reset
• /rosout/get_loggers
• /rosout/set_logger_level
• /spawn
• /teleop_turtle/get_loggers
• /teleop_turtle/set_logger_level
• /turtle1/set_pen
• /turtle1/teleport_absolute
• /turtle1/teleport_relative
• /turtlesim/get_loggers
• /turtlesim/set_logger_level
������rosservice type�鿴һ��clear�������
2.2 rosservice type
�÷���
rosservice type [service]
���Dz���clear������ʲô���͵ģ�
$ rosservice type clear
• std_srvs/Empty
��������ǿյģ���ζ�ŵ����������ʱ�����κβ������༴�������������շ���ʱ���ý������κβ�������������rosservice call�������������
2.3 rosservice call
�÷���
rosservice call [service] [args]
�������ǵ���ʱû���κβ�������Ϊ�������Ϊ�����͵ģ�
$ rosservice call clear
�����������ϣ��������turtlesim_node�ڵ�ı�����
•

���Dz鿴һ�´������ķ���spawn��
$ rosservice type spawn| rossrv show
• float32 x
• float32 y
• float32 theta
• string name
• ---
• string name
���������������ָ����λ������һ���µĺ��ꡣname�����ǿ�ѡ�ģ����Բ����ã������Dz���ָ�����ֲ���һ�����ꣻ
$ rosservice call spawn 2 2 0.2 ""
������û᷵���²����ĺ�������֣�
• name: turtle2
ִ�н��������ͼ��ʾ��
•

3. rosparam���÷�
rosparam �������Dz���������ROSϵͳ�в��������е����ݡ�����������Դ洢integer��float��boolean��dictionaries�� lists��rosparam����YAML������ԣ��Ľ���YAML�������dz���Ȼ��1 is an integer, 1.0 is a float, one is a string, true is a boolean, [1, 2, 3] is a list of integers, and {a: b, c: d} is a dictionary. rosparam���кܶ��������ڲ���������������ʾ��
�÷���
rosparam set set parameter
rosparam get get parameter
rosparam load load parameters from file
rosparam dump dump parameters to file
rosparam delete delete parameter
rosparam list list parameter names
���Dz鿴һ�µ�ǰ���������ж���ʲô������
3.1 rosparam list
$ rosparam list
���ǿ���turtlesim�ڵ��������йر���ɫ�IJ��������ڲ��������У�
• /background_b
• /background_g
• /background_r
• /roslaunch/uris/aqy:51932
• /run_id
������rosparam set�ı�����һ��������
3.2 rosparam set and rosparam get
�÷���
rosparam set [param_name]
rosparam get [param_name]
�������Ǹı䱳��ɫ�ĺ�ɫ���֣�
$ rosparam set background_r 150
��������ı��˲�����ֵ�����DZ������clear�������ʹ�ı�IJ�����Ч��
$ rosservice call clear
ִ�н��������ʾ��
•

���Dz鿴���������е���������ֵ����һ�±���ɫ�е���ɫ������ֵ��
$ rosparam get background_g
• 86
����Ҳ����ͨ��rosparam get/ �����ȡ�������������в�������ֵ��
$ rosparam get /
• background_b: 255
• background_g: 86
• background_r: 150
• roslaunch:
• uris: {'aqy:51932': 'http://aqy:51932/'}
• run_id: e07ea71e-98df-11de-8875-001b21201aa8
��Ҳ����Ѳ������浽�ļ��У��Ա���һ�ο��Ե��á�����rosparam�����Ƿdz�����ģ�
3.3 rosparam dump and rosparam load
�÷���
rosparam dump [file_name]
rosparam load [file_name] [namespace]
���DZ������в�����һ������Ϊparams.yaml���ļ��У�
$ rosparam dump params.yaml
����Լ�����Щyaml�ļ����µ������ռ䣬����copy��
$ rosparam load params.yaml copy
$ rosparam get copy/background_b
• 255
��������ƪ�̳̽���ROSϵͳ��rqt_console��rqt_logger_level�ĵ��Է�ʽ������roslaunchһ����������ڵ㣻����������ڵİ汾��fuerte����ǰ�İ汾����rqtҲ���������ã����Բ��û���rx����ع��ߡ�
1. rqt��ǰ������turtlesim���ܰ�
��ƪ�̳�ͬʱ�õ���rqt��turtlesim���ܰ���Ϊ������ⲿ�̳̣��밲װ���������ܰ�������ͨ���������װ��
$ sudo apt-get install ros-
�滻�����е�
ע�⣺��Ҳ���Ѿ���ǰ��Ľ̳��б����rqt��turtlesim�ˣ�����㲻ȷ�����������°�װһ�£��������κ�Ӱ�졣
2. rqt_console��rqt_logger_level���÷�
rqt_console������ROSϵͳ����־��ܣ�������ʾ�ڵ�������Ϣ��ͨ��rqt_logger_level���Ե�����ǰ���нڵ������Ϣ����ʾ����DEBUG��WARN��INFO��ERROR����
������������rqt_console�鿴һ��turtlesim�������Ϣ��ͬʱ��rqt_logger_level����һ����־����������turtlesimǰ�����´����������նˣ��ֱ�����rqt_console��rqt_logger_level��
$ rosrun rqt_console rqt_console
$ rosrun rqt_logger_level rqt_logger_level
��ʱ�ᵯ������������Ϣ��


��ʱ�������µ������ն�����turtlesim��
$ rosrun turtlesim turtlesim_node
��ΪĬ�ϵ�logger����ΪINFO�����ǿ��Կ���turtlesim����ʱ���������κ���Ϣ�������Ϣ��������ʾ��

������rqt_logger_level���ڵ���һ����־����Warn����������ʾ��ѡ��Warn:

��ʱ������С�ڹ꣬��������ǽ�ڣ�ע�����ڱ�Ե�����鿴һ��rqt_console��������Ϣ��
rostopic pub /turtle1/command_velocity turtlesim/Velocity -r 1 -- 2.0 0.0

2.1 Quick Note about logger levels
��־��������ȼ�˳��������ʾ��
Fatal
Error
Warn
Info
Debug
Fatal���ȼ������Debug���ȼ���͡�ͨ��������־��������Եõ�ͬ�������������������Ϣ��������ü���ΪWarn���㽫��õ�Warn��Error��Fatal�������־�����Ϣ��
����Crtl+C����turtlesim��ͨ��roslaunch�������turtlesim�ڵ㣬�������е�һ���ڵ�ģ����һ���ڵ�����:
3 Using roslaunch
Roslaunch�ᰴ�������ļ������ķ�ʽ�����ڵ㣺
�÷�:
$ roslaunch [package] [filename.launch]
���Ƚ���beginner_tutorials���ܰ���
$ roscd beginner_tutorials
���roscdʧ�ܣ������������ն�����ROS_PACKAGE_PATH�ı���������������ʾ��
$ export ROS_PACKAGE_PATH=~/
$ roscd beginner_tutorials
�����Ȼ���ҵ�beginner_tutorials������Ҫ����ǰ��Ŀγ����´���������ܰ��ˡ�
Ȼ��������Ҫ����һ������Ŀ¼��
$ mkdir launch
$ cd launch
3.1 The Launch File
�������Ǵ�������Ϊturtlemimic.launch�������ļ�����������ճ���������ݣ�
3.2 The Launch File Explained
�������Ƿֿ�����һ��launch�����ݣ�
���������ļ�����launch��Ϊ��ʼ��ǩ����������ļ��ͱ���ʶΪ�����ļ���
�������������飬�ֱ�����Ϊturtlesim1��turtlesim2���������飬����Դ��ͬ���Ĺ��ܰ�turtlesim��ͬ��������sim��ͬ��������turtlesim_node��������������ģ�������Ա������ַ���ij�ͻ��
������������ģ��ڵ㣬�������뻰�⼰�������ֱ�����Ϊturtlesim1��turtlesim2��������֮������turtlesim2ģ��turtlesim1���С�
���xml��ǩ��Ϊ�����ļ����õĽ�����
3.3 roslaunching
����ͨ��roslaunch����launch�ļ���
$ roslaunch beginner_tutorials turtlemimic.launch
����turtlesims�Ѿ������ˣ����µ������ն˷���rostopic�������£�
$ rostopic pub /turtlesim1/turtle1/command_velocity turtlesim/Velocity -r 1 -- 2.0 -1.8
���Կ�������ʹ�������turtlesim1���������ڹ����ʼ�˶���

���ǿ��Խ�����rqt_graph�����õ�����launch�ļ�����ʲô������rqt��������Ȼ��ѡ��rqt_graph��
$ rqt
�������룺
$ rqt_graph
 ���dzɹ��IJ���rqt_console��roslaunch����һ�������˽�һ��ROSϵͳ�еı༭ѡ����ڿ���ͨ��Ctrl-C��ֹ���е�turtlesims�ˣ���һ���̳������Dz�����Ҫ�����ˡ�
���dzɹ��IJ���rqt_console��roslaunch����һ�������˽�һ��ROSϵͳ�еı༭ѡ����ڿ���ͨ��Ctrl-C��ֹ���е�turtlesims�ˣ���һ���̳������Dz�����Ҫ�����ˡ�
��������ƪ�̳���Ҫ�������ʹ��rosed����ʹ�༭�ļ����ӷ��㡣
1. Using rosed
rosed ��rosbash��֮һ�������������ǿ���ʹ������ֱ�ӱ༭���ܰ��е��ļ���������֪�����ܰ���·����
�÷���
$ rosed [package_name] [filename]
ʾ����
$ rosed roscpp Logger.msg
�������չʾ����α༭���ܰ�roscpp�е��ļ�Logger.msg������������û�������ã��п�������Ϊ���vim�༭����û�а�װ����ο�Editor���ֽ��а�װ��
���������������ܰ��в�����Ψһ�ģ���ᵯ��һ���˵�����ѡ����ȷ���Ǹ��ļ�����Ҫ�༭�ġ�
2. Using rosed with tab completion
����tab���ķ�ʽ�����Ժܷ���ı༭���ܰ��е������ļ���������֪��������ļ�����
�÷���
$ rosed [package_name]
3. Editor
Ĭ�ϵ�rosed�༭��Ϊvim�������Ҫ����Ϊ������Ĭ�ϱ༭��������Ҫ�༭�ļ�~/.bashrc������������Ϣ��
exportEDITOR='emacs -nw'
������Ӳ���emacs��ΪĬ�ϱ༭����
ע�⣺�ı�.bashrc�ļ��������������������ն���Ч���Ѿ������������ն˲����ټ���������
���µ������նˣ��鿴EDITOR�Ƿ����ˣ�
$ echo $EDITOR
• emacs -nw
�����Ѿ��ɹ������ò�ʹ����rosed���������Ǵ���һ��Msg��Svr��
��������ƪ�̳̺�����������ɲ�����msg��srv�ļ�����rosmsg��rossrv��roscp������ߵ��÷���
1. msg��srv����
•msg��msg�ļ��Ǽ��ı��ļ�����������ROS����Ϣ����Ϣ�ĸ��������������Ϊ��ͬ�ı�����������й���Ϣ��Դ���롣
•srv������������ļ�������������ɣ�����ͷ�����
msg�ļ������ڹ��ܰ���msgĿ¼�£�srv�ļ�������srvĿ¼�¡�
msgsֻ��һЩÿ�д������ͺ����ֵ��ı��ļ�������ʹ�õ��������£�
• int8, int16, int32, int64 (plus uint*)
• float32, float64
• string
• time, duration
• other msg files
• variable-length array[] and fixed-length array[C]
ROS����һ���Ƚ���������ͣ�Header��������ROSϵͳ�г��õ�ʱ�����������Ϣ��һ����msg�ļ��ĵ�һ�л�ָ��ΪHeader header��
����Ϊmsg�����ӣ��������ʹ����Header��string�ַ����������������͵�msgs��
Header header
string child_frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/TwistWithCovariance twist
srv�ļ��dz�������msg�ļ������ǰ����������֣�����ͷ��������������ֱ���---���ָ���������Ϊsrv��һ�����ӡ�
int64 A
int64 B
---
int64 Sum
������������У�A��B����������ı�������Sum�Ƿ����Ľ��������
2. Using msg
2.1 Creating a msg
������ǰ��γ��д����Ĺ��ܰ��ﶨ��һ���µ�msg��
$ cd ~/catkin_ws/src/beginner_tutorials
$ mkdir msg
$ echo "int64 num" > msg/Num.msg
�����������У�*.msg�ļ�ֻ�Ǽİ���һ�У�������Ϣ���������Ҫ������������ʾ���Ӷ��Ԫ��������һ�����ӵ��ļ���
string first_name
string last_name
uint8 age
uint32 score
����һ����Ҫȷ�ϵ��ǣ�msg�ļ���Ҫת��ΪC++��Python������������Ե�Դ���롣
��package.xml�ļ���ȷ���ļ��д����������ж��壺
ע�⣬�ڱ���ʱ����Ҫ������message_generation������������ʱ��ֻ��Ҫ������message_runtime����
������ϲ�����ı��༭����ǰ��γ�ѧϰ��rosed��һ��������ѡ��CMakeLists.txt�ļ���
��CMakeLists.txt�ļ�������message_generation�����ܰ�������Ա��ڣ��ڵ㣩��������������Ϣ��ֻ�������message_generation��COMPONENTS�б��м��ɣ�������ʾ��
# Do not just add this line to your CMakeLists.txt, modify the existing line
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation)
��Ҳ��ע���ʹû�е���find_package��ȫ�����������Ĺ���Ҳ�����������롣������Ϊcatkin���������еĹ��̣�Ҳ��ǰ�ڱ�Ĺ��̵�����find_package������Ĺ���ʹ����ͬ�������á����������������ʱ�������ӣ����±���ʧ�ܡ�
ͬ������Ҫȷ������ʱ�����������ӽ�����
catkin_package(
...
CATKIN_DEPENDS message_runtime ...
...)
�������µĴ�������
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
ȥ��ÿ��ǰ���ע�ͷ��š�#�����������Լ���.msg�滻Message*.msg�ļ����滻��������ʾ��
add_message_files(
FILES
Num.msg
)
ͨ���ֶ�����.msg�ļ���ȷ����CMake����������ʱ֪����Щ�����ӵ�.msg�ļ���
2.2 Using rosmsg
����Ľ��ܾͿ��Բ���һ��msg�ļ��ˡ�������rosmsg show��������ж�ROS�Ƿ��ܼ�����
�÷���
$ rosmsg show [message type]
ʾ����
[html] view plaincopyprint?$ rosmsg show beginner_tutorials/Num
$ rosmsg show beginner_tutorials/Num
�õ�ִ�н����
• int64 num
��ǰ���ʾ���У�ָ��������������������֣�
• beginner_tutorials -- the package where the message is defined
• Num -- The name of the msg Num.
�����Dz���msg�ļ��������ĸ����ܰ��ڣ����Կ�ȱ���ܰ������֣�
$ rosmsg show Num
ִ�н��������ʾ��
• [beginner_tutorials/Num]:
• int64 num
3. Using srv
3.1 Creating a srv
�����ڸոմ����Ĺ��ܰ�������һ��srv��
$ roscd beginner_tutorials
$mkdirsrv
���Ǵ���һ�����ܰ��и��Ƴ�һ��srv�����������ֶ������ˡ�roscp��һ���dz����õ������й��ߣ����ڴ�һ�����ܰ������ļ�����һ�����ܰ��С�
�÷���
$ roscp [package_name] [file_to_copy_path] [copy_path]
�������ǿ���rospy_tutorials���ܰ��ķ���
$ roscp rospy_tutorials AddTwoInts.srv srv/AddTwoInts.srv
����һ����Ҫȷ�ϵ��ǣ����DZ���ȷ��srv�ļ�����ΪC++��Python����������ת��ΪԴ���롣
�������ǰ�滹û������message_generation��CMakeLists.txt�ļ��У�������ȷ����message_generation���ӽ�ȥ���Ա��ܹ�������Ϣ��
# Do not just add this line to your CMakeLists.txt, modify the existing line
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation)
��û����message_generationͬʱΪmsg��srv������
ͬ����Ҳ��ҪΪ��Ϣ�ͷ���ı�package.xml�ļ����鿴���渽�ӵ������
ȥ��������ǰ���ע�ͷ���#��
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
��Service*.srv�ļ��滻Ϊ�Լ��ķ����ļ����滻��������ʾ��
add_service_files(
FILES
AddTwoInts.srv
)
3.2 Using rossrv
����Ľ��ܾͿ��Բ���һ��srv�ļ��ˡ�������rossrv show��������ж�ROS�Ƿ��ܼ�����
�÷���
$ rossrv show
ʾ����
$ rossrv show beginner_tutorials/AddTwoInts
����������ִ�н����
• int64 a
• int64 b
• ---
• int64 sum
��rosmsg���ƣ�������ʾ���Բ�ָ�����ܰ������������ҷ����ļ���
$ rossrv show AddTwoInts
[rospy_tutorials/AddTwoInts]:
int64 a
int64 b
---
int64 sum
4. Common step for msg and srv
��������CMakeLists.txt���ҵ����²��֣�
# generate_messages(
# DEPENDENCIES
# # std_msgs # Or other packages containing msgs
# )
ȥ��ע�Ͳ����� .msg�ļ���������Ϣʱ��������������ܰ�����������Ҫ����std_msg�����Ӻ�������ʾ��
generate_messages(
DEPENDENCIES
std_msgs
)
��Ȼ���Ǵ�����һЩ�µ���Ϣ��������Ҫ��make�������±�����Щ���ܰ���
# In your catkin workspace
$ cd ../..
$ catkin_make
$ cd -
��msgĿ¼�µ�����.msg�ļ�����Ϊ����֧�ֵı���������ɴ��롣C++������Ϣ��ͷ�ļ������ɵ�~/catkin_ws/devel /include/beginner_tutorials/�ļ����У�Python�ű��ļ������ɵ�~/catkin_ws/devel/lib /python2.7/dist-packages/beginner_tutorials/msg���ļ����У�Lisp�����ļ����ɵ�·��~ /catkin_ws/devel/share/common-lisp/ros/beginner_tutorials/msg/�ڡ�
The full specification for the message format is available at the Message Description Language page.
5. Getting Help
�����Ѿ���������ROS������ˣ������סÿһ������IJ������Ƿdz����ѵģ����˵��ǣ���ROS������ṩ�˰�����Ϣ��
������ʾ��
$ rosmsg -h
• You should see a list of different rosmsg subcommands.
• ���Կ���rosmsg�еĸ��ֶ�����������������
• Commands:
• rosmsg show Show message description
• rosmsg users Find files that use message
• rosmsg md5 Display message md5sum
• rosmsg package List messages in a package
rosmsg packages List packages that contain messages
Ҳ���Բ鿴�����������������İ�����Ϣ��
$ rosmsg show -h
• This shows the arguments that are needed for rosmsg show:
• ������ʾ��rosmsg show����IJ�����Ϣ��
• Usage: rosmsg show [options]
•
• Options:
• -h, --help show this help message and exit
-r, --raw show raw message text, including comments
6. Review
�����оٳ�����Ϊֹ�����õ�������ߣ�
• rospack = ros+pack(age) : provides information related to ROS packages
• rosstack = ros+stack : provides information related to ROS stacks
• roscd = ros+cd : changes directory to a ROS package or stack
• rosls = ros+ls : lists files in a ROS package
• roscp = ros+cp : copies files from/to a ROS package
• rosmsg = ros+msg : provides information related to ROS message definitions
• rossrv = ros+srv : provides information related to ROS service definitions
• rosmake = ros+make : makes (compiles) a ROS package
7.Next Tutorial
�������Ǵ�����һ���µ�msg��srv���������Ǽı�дһ�������������ߣ�python��C++����